低耗能
*有外力产生时,会因应外力的状态即时增加/减少电流的输出,降低能耗损失,同时不影响应有之性能
全效能
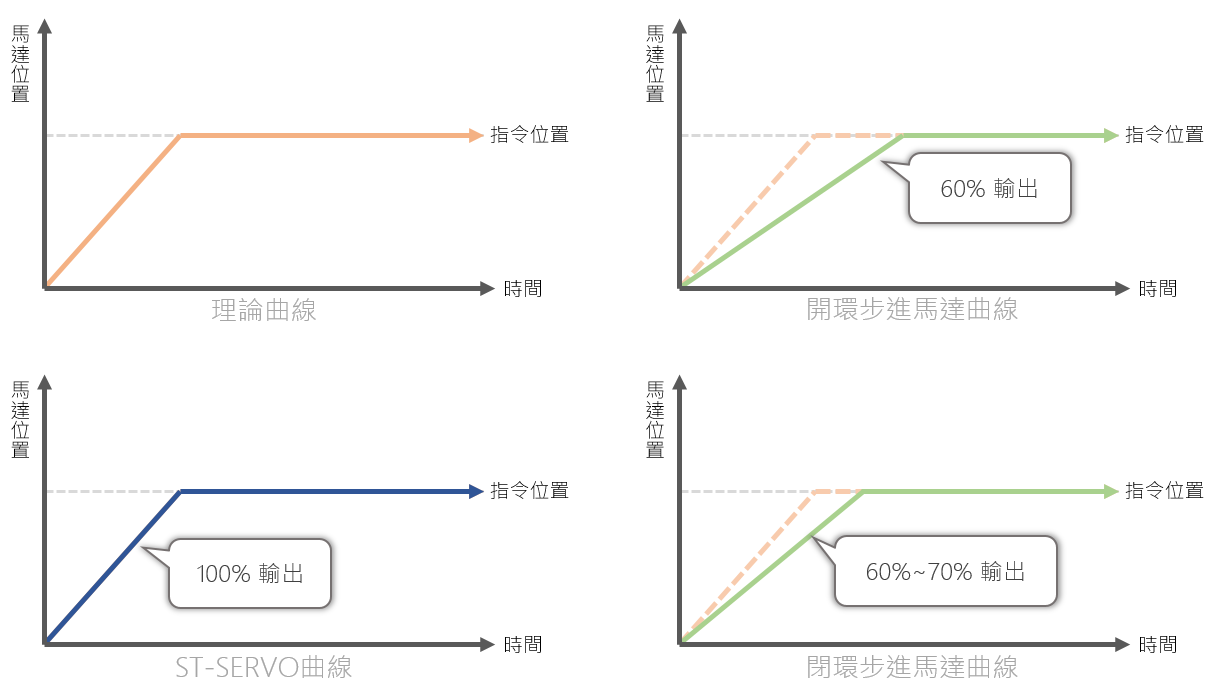
ST-SERVO是透过编码器计数后与步进数对比,根据实际位置输出相应的电流大小与相位,实现高性能的控制技术,扭力输出可以直接100%输出(位置/速度150%)设定并不会发生失步。
一般开环步进马达因不带编码器,因此无法得知马达位置,也不知失步何时会发生,因此扭力输出只敢设定极限的60%上下,藉以防止失步的问题产生。
闭环式步进马达因带编码器的关係,虽然知道马达的位置,但对马达的驱动仍是固定电流的方式,无法应负荷来随时改变扭力的输出,虽说有编码器可得知失步状态再作马达的重启,失步位置的修正,但仍无法达到100%全输出的控制。
扭力控制
-
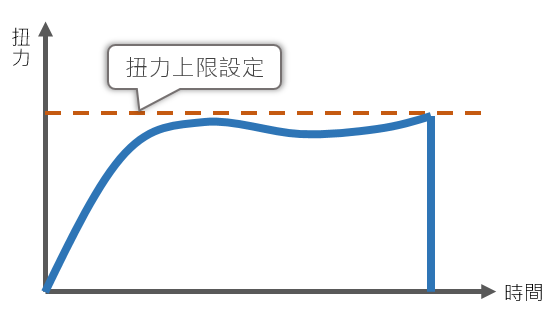
可针对所需要驱动物件进行“指定扭力”设定,作动中一旦扭力达到指定扭力值时,即立刻停止。
-
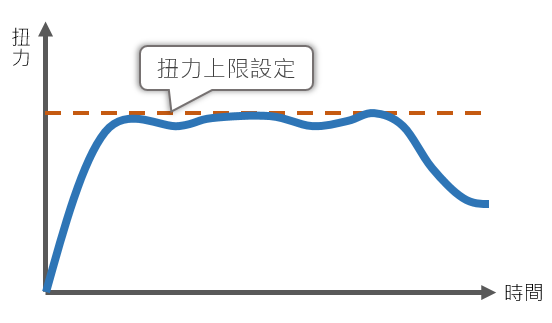
亦可对所需要驱动物件进行“扭力上限”设定,作动中扭力最多只会到达扭力上限不会超过,对此可进行特定动作之达成(如上紧螺丝扭力)。
超静音
*此测试于Pitch 2mm的滑台上,安装ST-Servo与一般步进马达,于运转时的噪音差异
超低震动
*此测试是将马达放置于相同的铁板,进行一般步进与ST-SERVO启动、定转时的震动比较。(转速皆为240RPM)
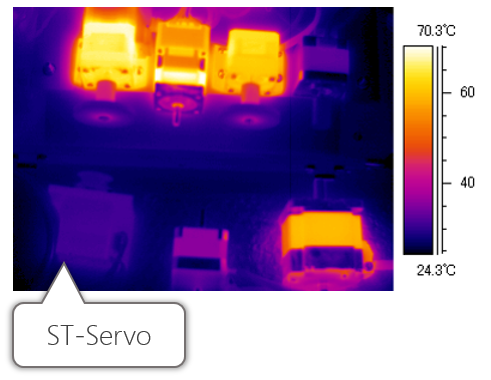
低发热
透过电流控制技术,就算长时间运转的状态下,也不会发生一般步进马达常见的发热状态。
*透过热感应仪作的马达发热状态测试。测试的马达为运转后2小时的状态。可以看到的是ST-SERVO明显较市面上其它品牌的马达发热来的低。
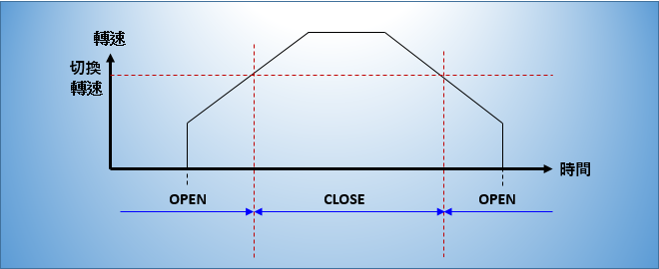
运作中切换开闭环
-
可用转速在运行间切换开环与闭环的控制,利用开环与闭环不同的属性减少整定时间的浪费
-
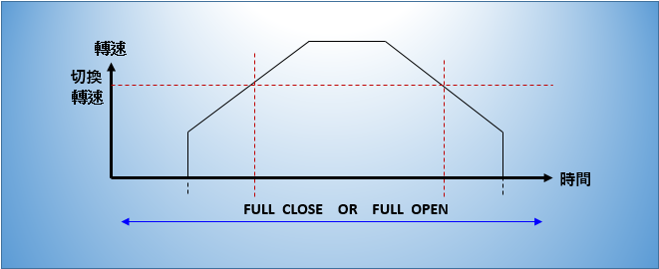
也可以进行全时开环或全时闭环的控制动作。以符合不同的使用需求
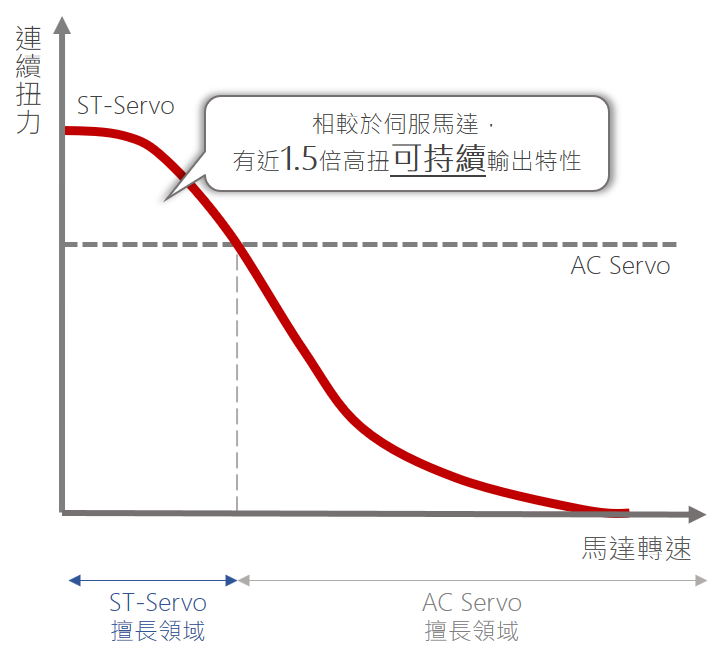
低转速高扭力
-
在同等级动力输出能力的系统比较上,针对ST-Servo与AC Servo的输出扭力特性图,会有如右图般的扭力性能输出特性倾向。
-
ST-Servo不需像AC Servo必需透过减速机才能实现低速、高扭力输出特性。
-
如果是轻负荷的话,高速位置决定控制也是可以被实现的。
工业4.0
-
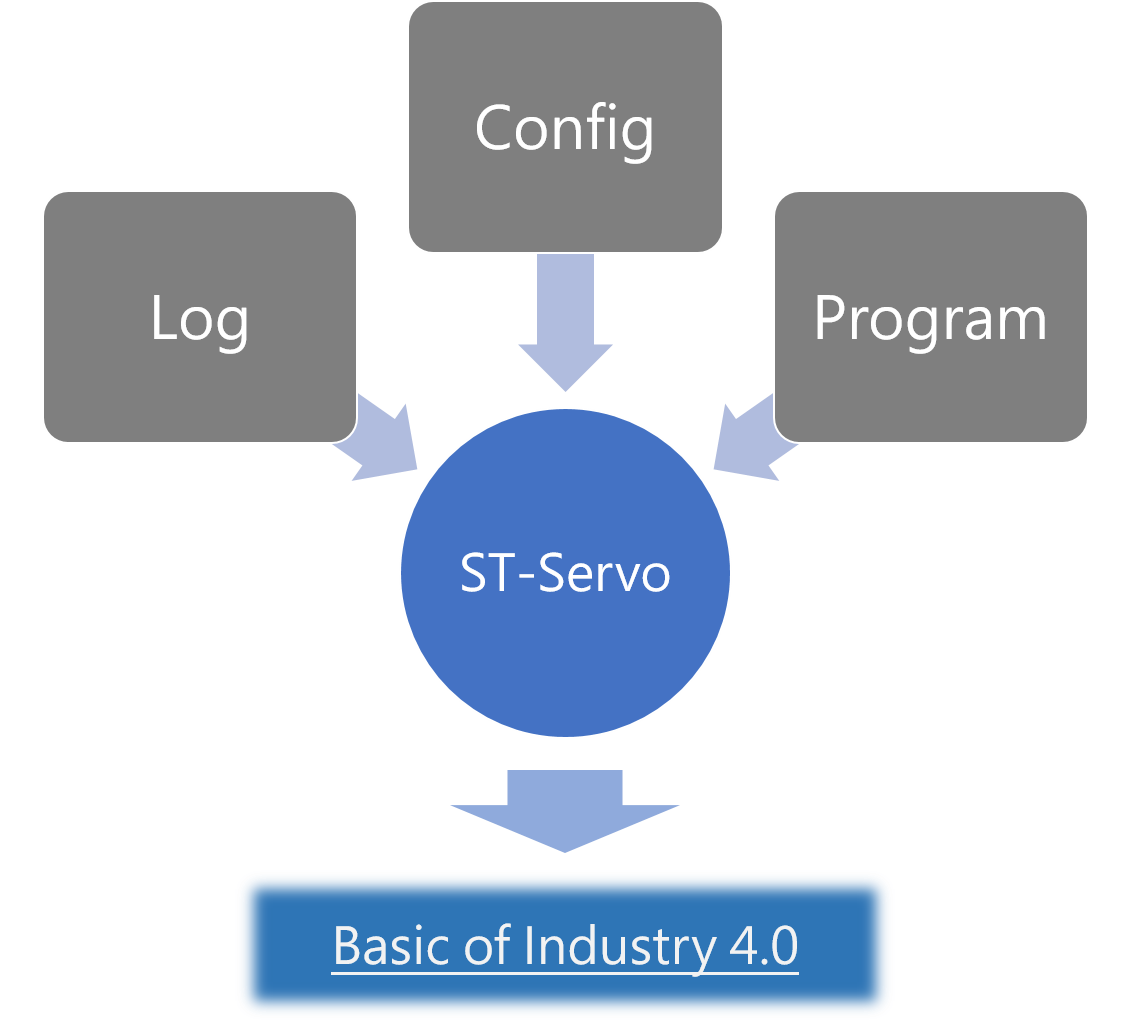
在工业4.0的领域中,最基础的是在各种生产环节中,不断蒐集讯息,并且可随时被控制进行反应。
-
轻鬆对应工业4.0,不需额外购买硬体控制模组即可达到控制、输出的相关功能。
-
ST-Servo不但可以完全满足控制的需求,还能即时感应、回传状态,简化整体设计所需的部件。
-
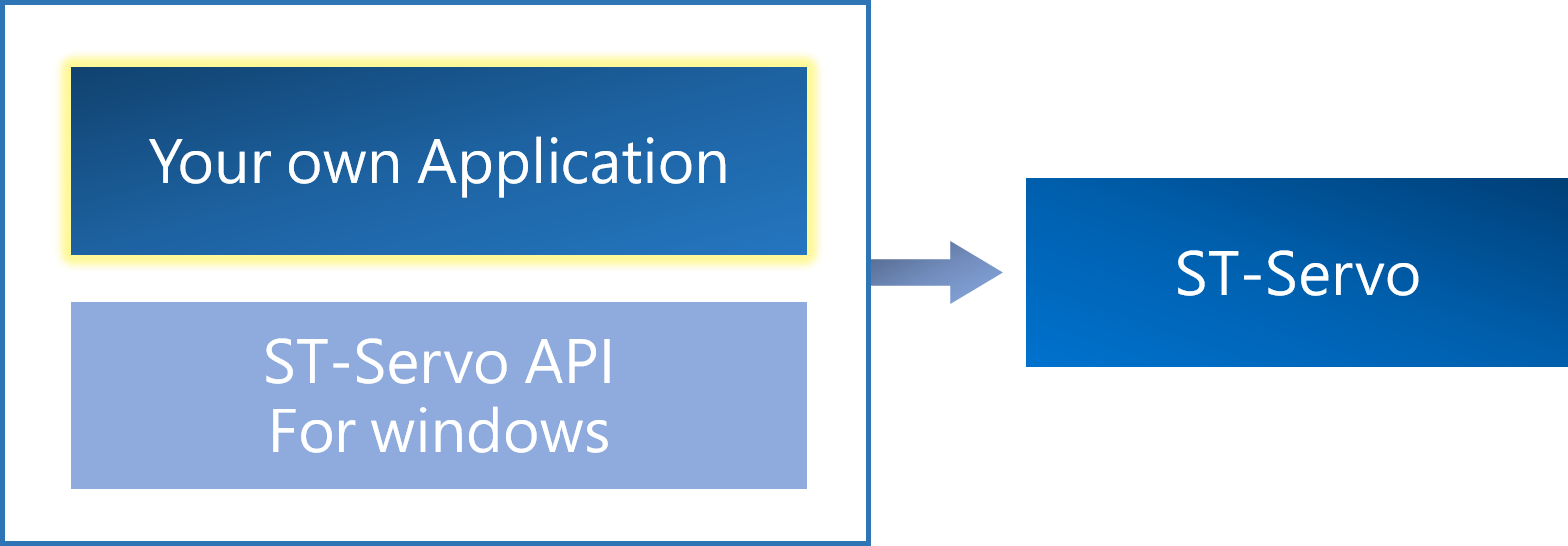
由友创与原厂合作开发的ST-Servo API,更可以让RD快速上手,应用在新产品上,毋须花费大量时间研究控制指令的撰写,并迅速整合至应用方案之中,缩短研发周期。